
ಅವಲೋಕನ
ಬ್ರಿಡ್ಜ್ ಕ್ರೇನ್ ಅನ್ನು ಸಾಮಾನ್ಯವಾಗಿ "ಡ್ರೈವಿಂಗ್" ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ, ಇದು ಕೈಗಾರಿಕಾ ಮತ್ತು ಗಣಿಗಾರಿಕೆ ಉದ್ಯಮಗಳಲ್ಲಿ ವ್ಯಾಪಕವಾಗಿ ಬಳಸಲಾಗುವ ಒಂದು ರೀತಿಯ ಎತ್ತುವ ಯಂತ್ರವಾಗಿದೆ, ಅದರ ಕಾರ್ಯಾಚರಣಾ ಕಾರ್ಯವಿಧಾನವು ಮೂರು ಮೂಲಭೂತವಾಗಿ ಸ್ವತಂತ್ರ ಡ್ರೈವಿಂಗ್ ಸಿಸ್ಟಮ್, ಕಾರ್ ಡ್ರೈವಿಂಗ್ ಸಿಸ್ಟಮ್, ಹುಕ್ ಡ್ರೈವಿಂಗ್ ಸಿಸ್ಟಮ್, ಕೆ-ಡ್ರೈವ್ ಇನ್ವರ್ಟರ್ ಅನ್ನು ಒಳಗೊಂಡಿದೆ. ಮೂರು ಡ್ರೈವಿಂಗ್ ಸಿಸ್ಟಮ್ ಅನ್ನು ಯಶಸ್ವಿಯಾಗಿ ಸುಧಾರಿಸಲಾಗಿದೆ, ಕೆಳಗಿನವು ಮುಖ್ಯವಾಗಿ ವಾಕಿಂಗ್ ಸಿಸ್ಟಮ್ನ ಮೊದಲು ಮತ್ತು ನಂತರ ಡ್ರೈವಿಂಗ್ನ ರೂಪಾಂತರ ಪ್ರಕ್ರಿಯೆಯನ್ನು ವಿವರಿಸುತ್ತದೆ.

ಯೋಜನೆ ಅನುಕೂಲಗಳು
- ಫೀಲ್ಡ್ ಓರಿಯೆಂಟೆಡ್ ಕರೆಂಟ್ ಓಪನ್-ಲೂಪ್ ವೆಕ್ಟರ್ ಕಂಟ್ರೋಲ್, ಸಂಪೂರ್ಣವಾಗಿ ಡಿಕೌಪ್ಲ್ಡ್ ಮೋಟಾರ್ ವೇರಿಯೇಬಲ್ಗಳು, ದೊಡ್ಡ ಕಡಿಮೆ-ಆವರ್ತನ ಟಾರ್ಕ್-ಇ, ವೇಗದ ಪ್ರತಿಕ್ರಿಯೆ, ಇತ್ಯಾದಿ;
- KD600 PG ಉಚಿತ ಓಪನ್-ಲೂಪ್ ವೆಕ್ಟರ್ ಕಂಟ್ರೋಲ್ ಮೋಡ್ ಮತ್ತು ವೆಕ್ಟರೈಸ್ಡ್ V/F ಮೋಡ್ ಅನ್ನು ಅಳವಡಿಸಿಕೊಳ್ಳುತ್ತದೆ ಮತ್ತು ಮೊದಲ ಗೇರ್ನ ಪವರ್ ಲೆ-ವೆಲ್ ಕಾನ್ಫಿಗರೇಶನ್ ಅನ್ನು ವರ್ಧಿಸುತ್ತದೆ;
- ಆವರ್ತನ ಶ್ರೇಣಿ: 0.5-600Hz ವಿಭಾಗದ ಸೆಟ್ಟಿಂಗ್, stepl-ess ನಿರಂತರ ಹೊಂದಾಣಿಕೆ;
- ವರ್ಕಿಂಗ್ ವೋಲ್ಟೇಜ್ ಶ್ರೇಣಿ: 380V ± 20%, ಮತ್ತು ಬಸ್ ವೋಲ್ಟೇಜ್ 360VDC ಗೆ ತತ್ಕ್ಷಣವೇ ತೊಂದರೆಯಿಲ್ಲದ ಆಪರೇಷನ್-ರೇಷನ್ಗೆ ಇಳಿಯುತ್ತದೆ;
- ಓವರ್ಲೋಡ್ ಸಾಮರ್ಥ್ಯ: 150% ರೇಟೆಡ್ ಕರೆಂಟ್, 1 ನಿಮಿಷ ಅನುಮತಿಸಲಾಗಿದೆ; 200% ದರದ ಪ್ರಸ್ತುತ, 1s ಅನುಮತಿಸಲಾಗಿದೆ;
- ಟಾರ್ಕ್ ಗುಣಲಕ್ಷಣಗಳು: ಆರಂಭಿಕ ಟಾರ್ಕ್, ರೇಟ್ ಮಾಡಲಾದ ಟಾರ್ಕ್ನ 2 ಪಟ್ಟು ಹೆಚ್ಚು; ಕಡಿಮೆ ಆವರ್ತನ ಟಾರ್ಕ್, 1Hz ನಲ್ಲಿ ರೇಟ್ ಮಾಡಲಾದ ಟಾರ್ಕ್ನ 1.6 ಪಟ್ಟು ಹೆಚ್ಚು; ಬ್ರೇಕಿಂಗ್ ಟಾರ್ಕ್ ರೇಟ್ ಮಾಡಲಾದ ಟಾರ್ಕ್ಗಿಂತ ಹೆಚ್ಚಾಗಿದೆ.
ಕಾರ್ಯಾಚರಣೆಯ ಗುಣಲಕ್ಷಣಗಳು
- ಕ್ರೇನ್ ಎತ್ತುವ ಕಾರ್ಯವಿಧಾನವು ದೊಡ್ಡ ಆರಂಭಿಕ ಟಾರ್ಕ್-ಯು ಅನ್ನು ಹೊಂದಿದೆ, ಇದು ಸಾಮಾನ್ಯವಾಗಿ ರೇಟ್ ಮಾಡಲಾದ ಟಾರ್ಕ್ನ 150% ಅನ್ನು ಮೀರುತ್ತದೆ. ಓವರ್ಲೋಡ್ ಮತ್ತು ಇತರ ಅಂಶಗಳನ್ನು ಪರಿಗಣಿಸಿದರೆ, ಪ್ರಾರಂಭ ಮತ್ತು ವೇಗವರ್ಧಕ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ ಕನಿಷ್ಠ 200% ರೇಟೆಡ್ ಟಾರ್ಕ್ ಅನ್ನು ಒದಗಿಸಲಾಗುತ್ತದೆ;
- ಎತ್ತುವ ಕಾರ್ಯವಿಧಾನವು ಕೆಳಮುಖವಾಗಿ ಚಲಿಸಿದಾಗ, ಮೋಟಾರ್ ಪುನರುತ್ಪಾದಕ ವಿದ್ಯುತ್ ಉತ್ಪಾದನೆಯ ಸ್ಥಿತಿಯಲ್ಲಿರುತ್ತದೆ ಮತ್ತು ಶಕ್ತಿಯ ಬಳಕೆಯ ಬ್ರೇಕಿಂಗ್ ಅಥವಾ ಗ್ರಿಡ್ಗೆ ಪುನರುತ್ಪಾದಕ ಪ್ರತಿಕ್ರಿಯೆಯಾಗಿರಬೇಕು;
- ಎತ್ತುವ ವಸ್ತುವು ನೆಲವನ್ನು ತೊರೆದಾಗ ಅಥವಾ ಸ್ಪರ್ಶಿಸಿದಾಗ ಎತ್ತುವ ಕಾರ್ಯವಿಧಾನದ ಹೊರೆ ನಾಟಕೀಯವಾಗಿ ಬದಲಾಗುತ್ತದೆ, ಮತ್ತು ಆವರ್ತನ ಪರಿವರ್ತಕವು ಇಂಪ-ಸಿಟಿ ಲೋಡ್ ಅನ್ನು ಸರಾಗವಾಗಿ ನಿಯಂತ್ರಿಸಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ;
- ಯಾಂತ್ರಿಕ ವಿನ್ಯಾಸದ ಸಮಯದಲ್ಲಿ ಕ್ರೇನ್ನ ಮುಂಭಾಗದ ಮತ್ತು ಹಿಂಭಾಗದ ಪ್ರಯಾಣದ ಯಾಂತ್ರಿಕತೆಯ ಅಸ್ಥೆಟ್ರಾವೆಲಿಂಗ್ ವೇಗವು ಹೆಚ್ಚಿಲ್ಲ, ಕೆಲಸದ ದಕ್ಷತೆಯನ್ನು ಸುಧಾರಿಸಲು ಪರಿವರ್ತಕವನ್ನು ಸರಿಯಾದ ವೇಗಕ್ಕಾಗಿ ಬಳಸಬಹುದು.
ಸರಳ ವೈರಿಂಗ್ ರೇಖಾಚಿತ್ರ
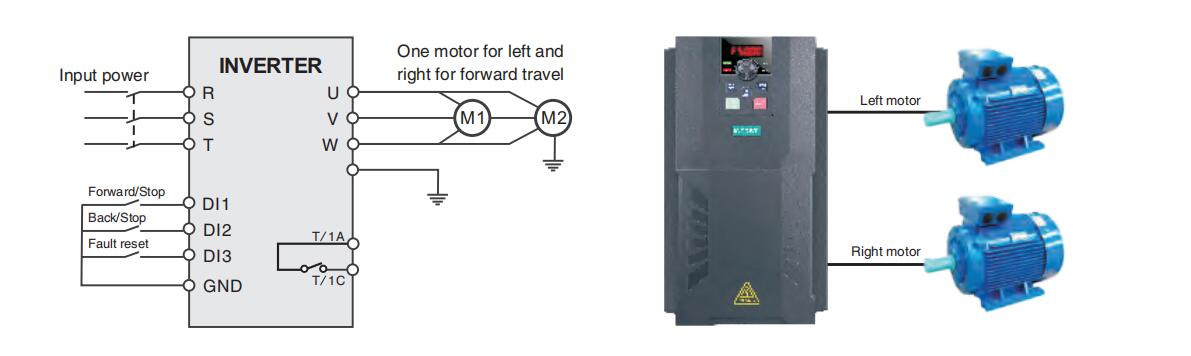
ನಿಯತಾಂಕ ಸೆಟ್ಟಿng ಮತ್ತು ವಿವರಣೆ(ಎಡ ಮತ್ತು ಬಲ ಮೋಟಾರ್ ಪ್ರಯಾಣದ ನಿಯತಾಂಕಗಳು)
| ಪ್ಯಾರಾಮೀಟರ್ | ವಿವರಿಸಿ | ಪ್ಯಾರಾಮೀಟರ್ ಸೆಟ್ಟಿಂಗ್ | ವಿವರಿಸಿ |
| P0-00=0 | ವಿಎಫ್ ನಿಯಂತ್ರಣ | P5-00=1 | ಮುಂದಕ್ಕೆ |
| P0-04=1 | ಬಾಹ್ಯ ಟರ್ಮಿನಲ್ ಸ್ಟಾರ್ಟ್ ಸ್ಟಾಪ್ | P5-01=2 | ನಂತರ ಕೈಗೊಳ್ಳಿ |
| P0-06=1 | ಡಿಜಿಟಲ್ ಆವರ್ತನ ಸೆಟ್ಟಿಂಗ್ | P6-00=2 | ರಿಲೇ 1 ತಪ್ಪು ಔಟ್ಪುಟ್ |
| P0-14=60.00 | ಗರಿಷ್ಠ ಆವರ್ತನ | P4-01=1.6KW | ಸಂಪರ್ಕಿತ ಮೋಟಾರ್ ಶಕ್ತಿ |
| P0-16=60.00 | ಗರಿಷ್ಠ ಮಿತಿ ಆವರ್ತನ | P4-02=380V | ಮೋಟಾರ್ ದರದ ವೋಲ್ಟೇಜ್ |
| P0-11=60.00 | ಡಿಜಿಟಲ್ ಸೆಟ್ಟಿಂಗ್ ಆವರ್ತನ | P4-04=3.3A | ಮೋಟಾರ್ ದರದ ಪ್ರಸ್ತುತ |
| P0-23=3.0s | ವೇಗವರ್ಧನೆಯ ಸಮಯ | P4-05=50Hz | ಮೋಟರ್ನ ರೇಟ್ ಆವರ್ತನ |
| P0-24=2.0s | ಕುಸಿತದ ಸಮಯ | P4-06=960R/ನಿಮಿಷ | ಮೋಟಾರ್ ವೇಗವನ್ನು ರೇಟ್ ಮಾಡಲಾಗಿದೆ |
| ಗಮನಿಸಿ: ಒಂದು ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಎರಡು ಮೋಟರ್ಗಳೊಂದಿಗೆ ಬಳಸಿದಾಗ, ಪ್ರತಿ ಮೋಟರ್ ಅನ್ನು ರಕ್ಷಿಸಲು ಪ್ರತಿ ಮೋಟರ್ನ ಮುಂಭಾಗದ ತುದಿಯಲ್ಲಿ ಹೊಂದಾಣಿಕೆಯ ಥರ್ಮಲ್ ರಿಲೇ ಅನ್ನು ಸ್ಥಾಪಿಸಲು ಬಲವಾಗಿ ಶಿಫಾರಸು ಮಾಡಲಾಗಿದೆ. | |||
ಕಾರ್ಯಾಚರಣೆಯ ಪರಿಣಾಮದ ವಿಶ್ಲೇಷಣೆ
KD600 ಸರಣಿಯ ಆವರ್ತನ ಪರಿವರ್ತಕವು ಪ್ರಯಾಣ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಆವರ್ತನ ಪರಿವರ್ತನೆ ರೂಪಾಂತರವನ್ನು ನಡೆಸಿದೆ, ಮತ್ತು TR-ರೂಪಾಂತರ ಪರಿಣಾಮವು ತುಲನಾತ್ಮಕವಾಗಿ ಸೂಕ್ತವಾಗಿದೆ, ಮುಖ್ಯವಾಗಿ ತೋರಿಸಲಾಗಿದೆ:
- ಪ್ರಾರಂಭದ ಸಮಯದಲ್ಲಿ ಮೃದುವಾದ ಪ್ರಾರಂಭ ಮತ್ತು ಮೃದುವಾದ ನಿಲುಗಡೆಯನ್ನು ಅರಿತುಕೊಳ್ಳಲಾಗುತ್ತದೆ, ಇದು ಪವರ್ ಗ್ರಿಡ್ ಮೇಲೆ ಪ್ರಭಾವವನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ;
- ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಬಳಸಿದ ನಂತರ, ಮೂಲ ಶಿಫ್ಟ್ ಕಾಂಟ್ಯಾಕ್ಟರ್ ಮತ್ತು ಸ್ಪೀಡ್ ರೆಗ್ಯುಲೇಟಿಂಗ್ ರೆಸಿಸ್ಟರ್ ಅನ್ನು ಬಿಟ್ಟುಬಿಡಲಾಗುತ್ತದೆ, ಇದು ನಿರ್ವಹಣಾ ವೆಚ್ಚವನ್ನು ಉಳಿಸುವುದಿಲ್ಲ, ಆದರೆ ನಿರ್ವಹಣೆಗಾಗಿ ಅಲಭ್ಯತೆಯನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ, ಹೀಗಾಗಿ ಔಟ್ಪುಟ್ ಅನ್ನು ಹೆಚ್ಚಿಸುತ್ತದೆ;
- ಮುಖ್ಯ ಹುಕ್ 5Hz ~ 30Hz ನಲ್ಲಿ ಕೆಲಸ ಮಾಡುವಾಗ, ಶಕ್ತಿಯ ಉಳಿತಾಯದ ಪರಿಣಾಮವು ತುಂಬಾ ಸ್ಪಷ್ಟವಾಗಿರುತ್ತದೆ;
- ಫ್ರಿಕ್ವೆನ್ಸಿ ಪರಿವರ್ತಕವನ್ನು ಮುಂಭಾಗ ಮತ್ತು ಹಿಂಭಾಗದ ಪ್ರಯಾಣವನ್ನು ನಿಯಂತ್ರಿಸಲು ಬಳಸಲಾಗುತ್ತದೆ, ಮತ್ತು ಎಡ ಮತ್ತು ಬಲ ಟ್ರಾವೆಲಿಂಗ್ ಯಾಂತ್ರಿಕ ಸರಣಿಯು ಓವರ್ ಫ್ರೀಕ್ವೆನ್ಸಿ ಕೆಲಸವನ್ನು ಅರಿತುಕೊಳ್ಳಬಹುದು. ಸುರಕ್ಷತೆಯನ್ನು ಖಾತ್ರಿಪಡಿಸುವ ಪ್ರಮೇಯದಲ್ಲಿ, ಕೆಲಸದ ದಕ್ಷತೆಯು ಹೆಚ್ಚು ಸುಧಾರಿಸುತ್ತದೆ ಮತ್ತು AC ಸಂಪರ್ಕಕಾರರ ಆಗಾಗ್ಗೆ ಬದಲಿಯಿಂದಾಗಿ ಪ್ರಯಾಣದ ಸಲಕರಣೆಗಳ ನಿರ್ವಹಣೆ ಕೆಲಸದ ಹೊರೆಯೂ ಕಡಿಮೆಯಾಗುತ್ತದೆ.
ಮುಕ್ತಾಯದ ಟೀಕೆಗಳು
ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಮುಂಭಾಗ ಮತ್ತು ಹಿಂಭಾಗದ ವಾಕಿಂಗ್ ಮತ್ತು ಎಡ ಮತ್ತು ಬಲ ವಾಕಿಂಗ್ ಯಾಂತ್ರಿಕ ಸರಣಿಯನ್ನು ನಿಯಂತ್ರಿಸಲು ಬಳಸಲಾಗುತ್ತದೆ, ಇದು ಓವರ್ಕ್ಲಾಕಿಂಗ್ ಕೆಲಸವನ್ನು ಅರಿತುಕೊಳ್ಳಬಹುದು, ಸುರಕ್ಷತೆಯನ್ನು ಖಾತ್ರಿಪಡಿಸುವ ಪ್ರಮೇಯದಲ್ಲಿ ಕೆಲಸದ ದಕ್ಷತೆಯನ್ನು ಹೆಚ್ಚು ಸುಧಾರಿಸುತ್ತದೆ ಮತ್ತು ಡ್ರೈವಿಂಗ್ ಉಪಕರಣಗಳ ನಿರ್ವಹಣಾ ಕೆಲಸದ ಹೊರೆಯನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ. AC ಸಂಪರ್ಕಕಾರರ ಆಗಾಗ್ಗೆ ಬದಲಿ.
ಅಪ್ಲಿಕೇಶನ್ ಸೈಟ್

ಪೋಸ್ಟ್ ಸಮಯ: ನವೆಂಬರ್-17-2023